5. 复杂任务与系统联调¶
5.1 独立模块实现(脚本篇)¶
为什么要用脚本(独立化脚本)?
脚本(如 Python)适合需高灵活、自动化、跨平台联动的模块,能突破 Omnigraph 的功能边界,核心价值有三:
复杂逻辑可定制:Omnigraph 预制节点无法覆盖的需求(如 A * 避障、点云分割、多机协同),脚本可通过代码编写算法。比如用 Python 实现 AGV “动态躲避临时障碍”,调用 OpenCV 处理图像、计算路径,实现定制化控制。
批量自动化提效:支持循环、条件判断,能批量生成场景、自动跑仿真、导出数据。比如机械臂精度测试,脚本可一键生成 100 组关节指令、自动记录误差并导出表格,10 分钟完成原本几小时的手动操作。
跨平台联动衔接:可对接 Isaac Sim 外系统(ROS 2、MATLAB、数据分析库),比如用 Python 脚本将仿真数据发至 ROS 2,或导出到 Pandas 做分析,是仿真模块与实际工程落地的关键桥梁。
5.1.1 导航仿真案例¶
注意:本章节导航建图部分可以参考4.2.1
5.1.1.1 导航设计思路¶
核心知识点:导航案例涉及 “SLAM 建图 + 路径规划”。
导航的核心是传感器:激光雷达、里程计。由于X1机器人本体的激光雷达在仿真平台的ActionGraph中不适配(当然也可以用类似的传感器在仿真中替代原来的激光雷达,理论上只需要传感器数据一致即可),因此通过独立化脚本的方式,实现激光雷达的采集数据、发布数据等步骤。
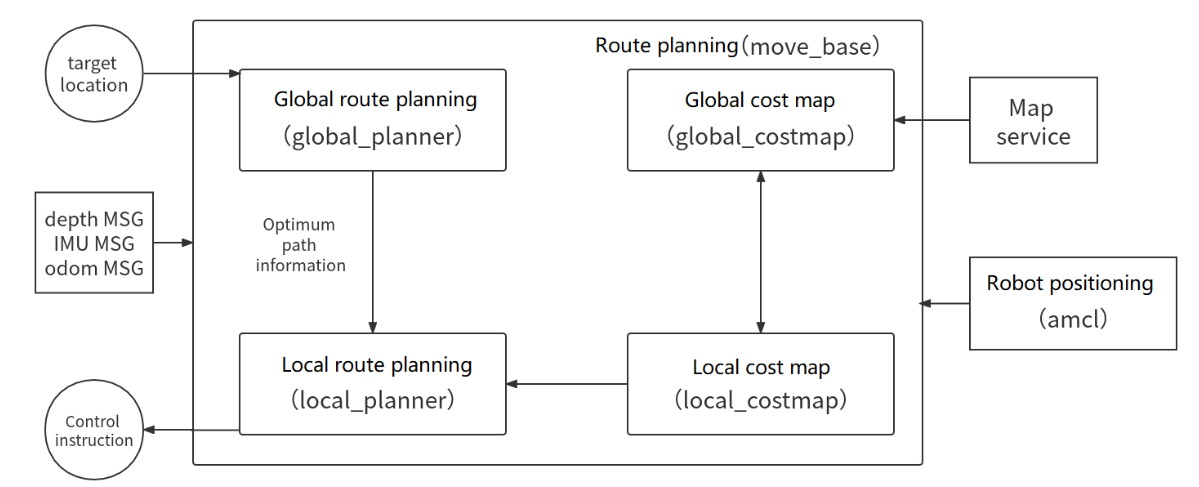
所以导航的整体思路是:在仿真中模拟真机X1机器人采集数据,并通过ROS2话题将数据发布给导航功能包Nav2,导航功能包接收数据后输出“Control instruction”,最终仿真机器人底盘接收,从而实现驱动机器人底盘运动(如下图)
5.1.1.2 导航模块Demo执行¶
该导航Demo具备在仿真平台上,通过rviz可视化界面,完成点到点的导航任务。而独立化脚本则是替代了原有的仿真平台启动方式以及ActionGraph的实现,用python代码的形式实现ROS订阅与发布,从而实现控制仿真机器人。
一、进入isaac-sim容器
执行命令:
docker exec -it isaac-lab-course-test bash执行独立化脚本:
python run_custom_navigation.py出现以下日志时,证明启动成功:
- 打开isaacsim-webrtc-streaming-client,输入IP后进入仿真:
- 可以看到运行效果:(演示导航用的机器人模型暂不涉及机械臂)
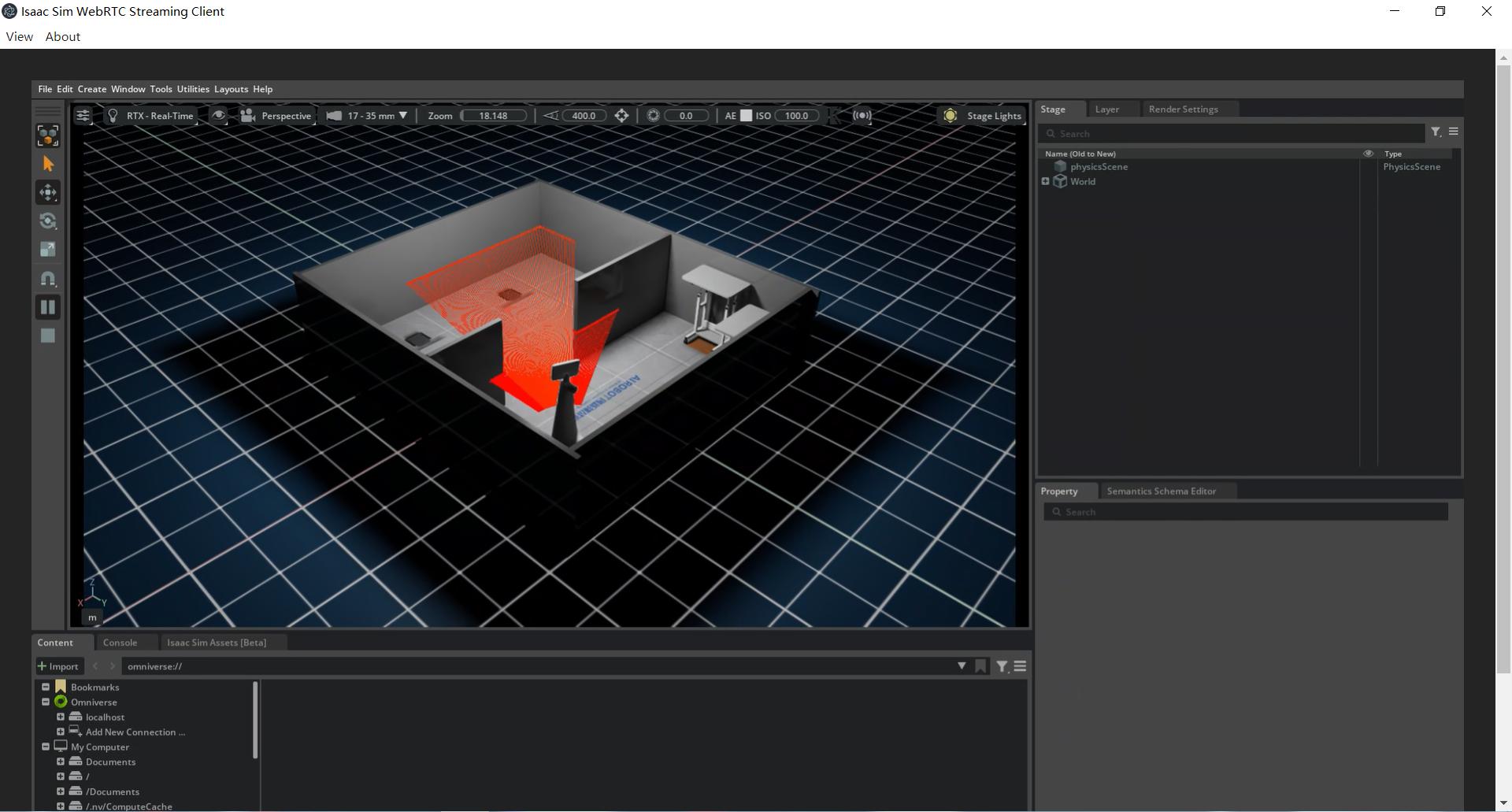
到这里已经通过独立化脚本,将仿真模块成功启动,接下去ROS2容器中启动导航功能包即可。
二、进入ROS2容器
完成2.2.1.2的建图与配置后
编译功能包:
colcon build --packages-select carter_navigation添加以下命令至~/.bashrc中,以免每次执行都要配置环境。
source /root/humble_ws/install/local_setup.bash
export FASTRTPS_DEFAULT_PROFILES_FILE=/root/humble_ws/fastdds.xml
export DISPLAY=:1
完成添加后,执行一次:
source ~/.bashrc。(仅需配置一次,之后每次执行无需理会环境)执行以下启动命令:
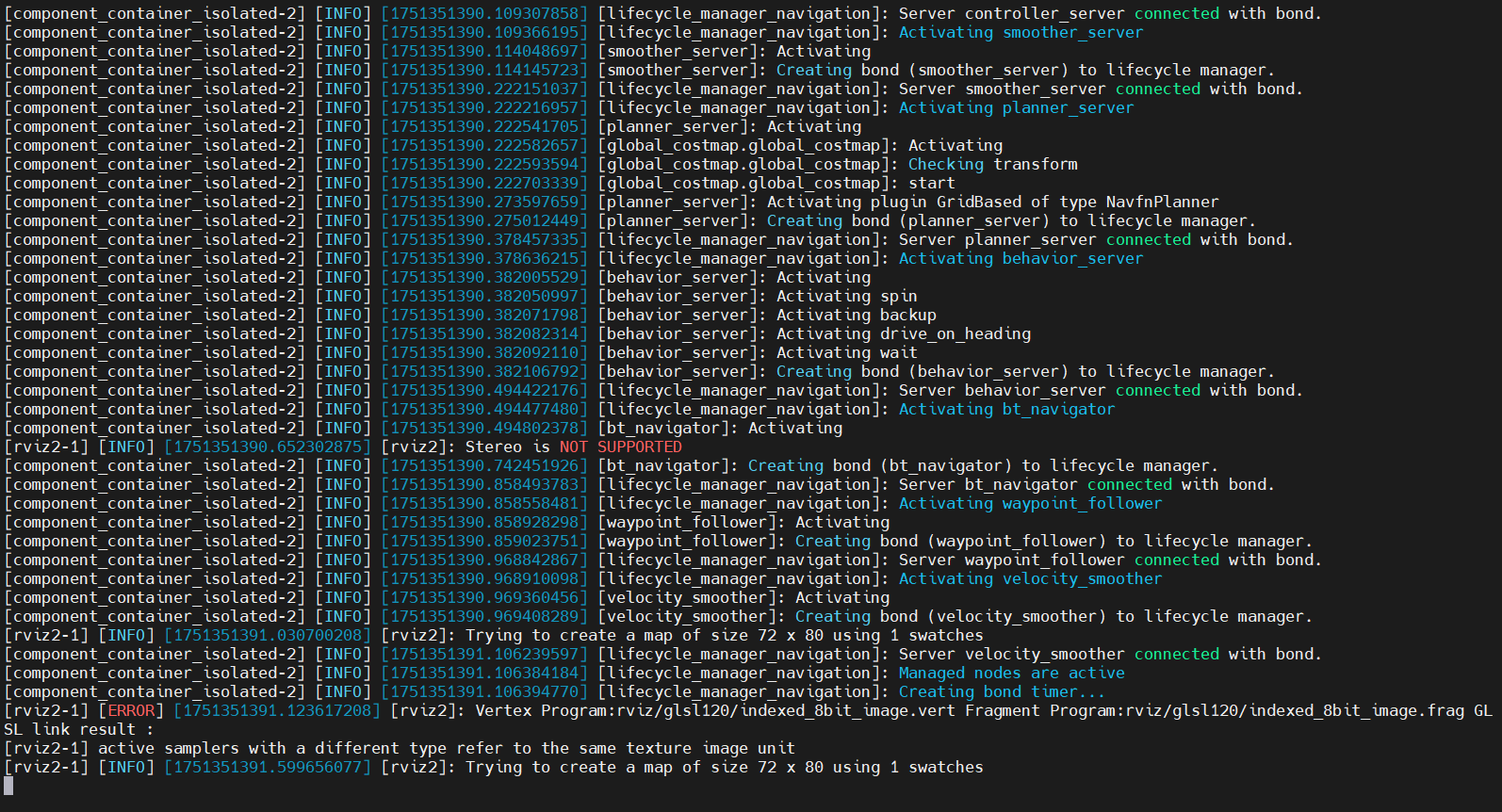
ros2 launch carter_navigation carter_navigation.launch.py use_sim_time:=true出现以下日志、服务器宿主机出现rviz并显示机器人和场景时,证明启动成功:
- 若出现以下相关报错,执行该命令:
xhost +就能解决:

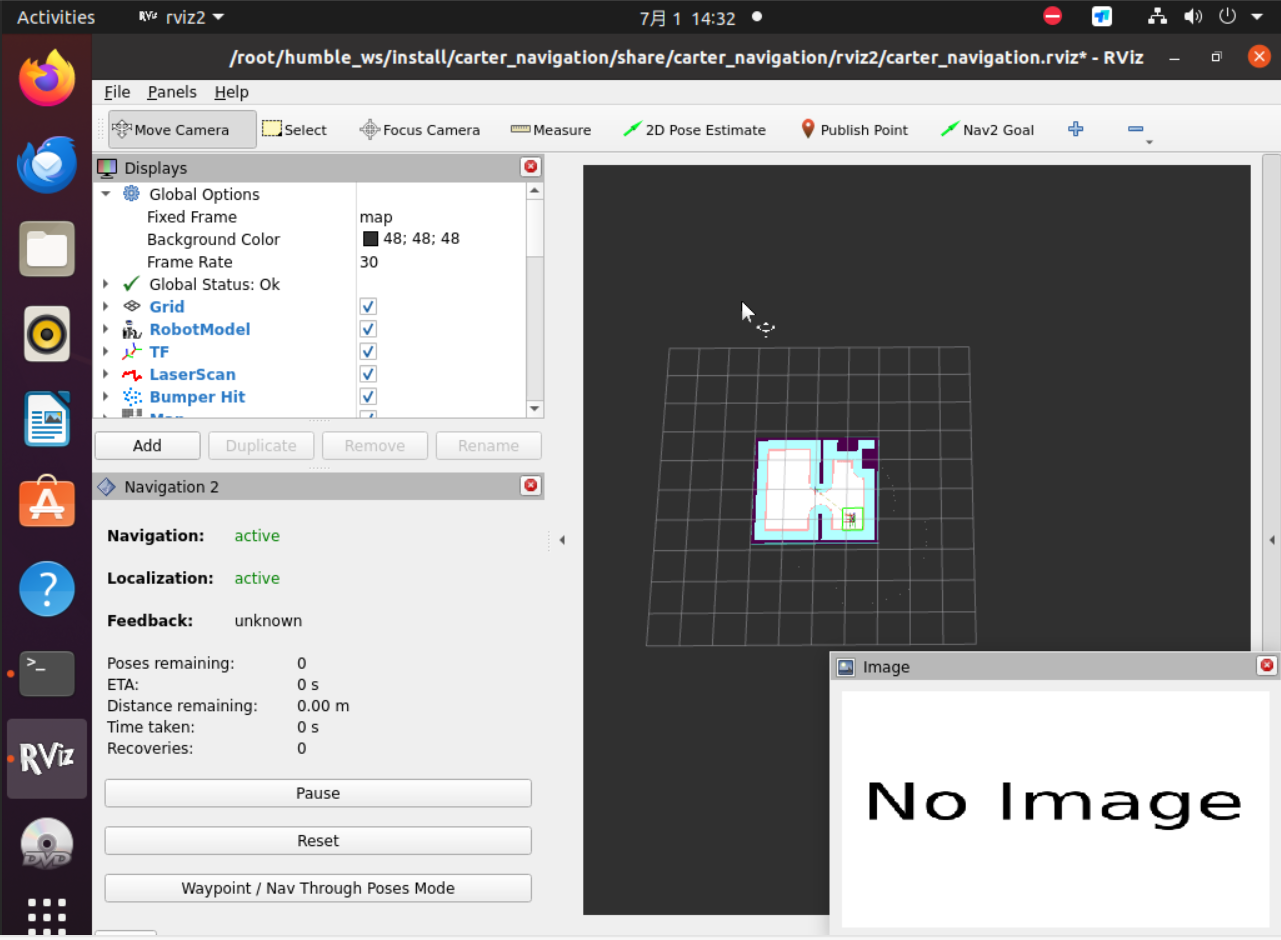
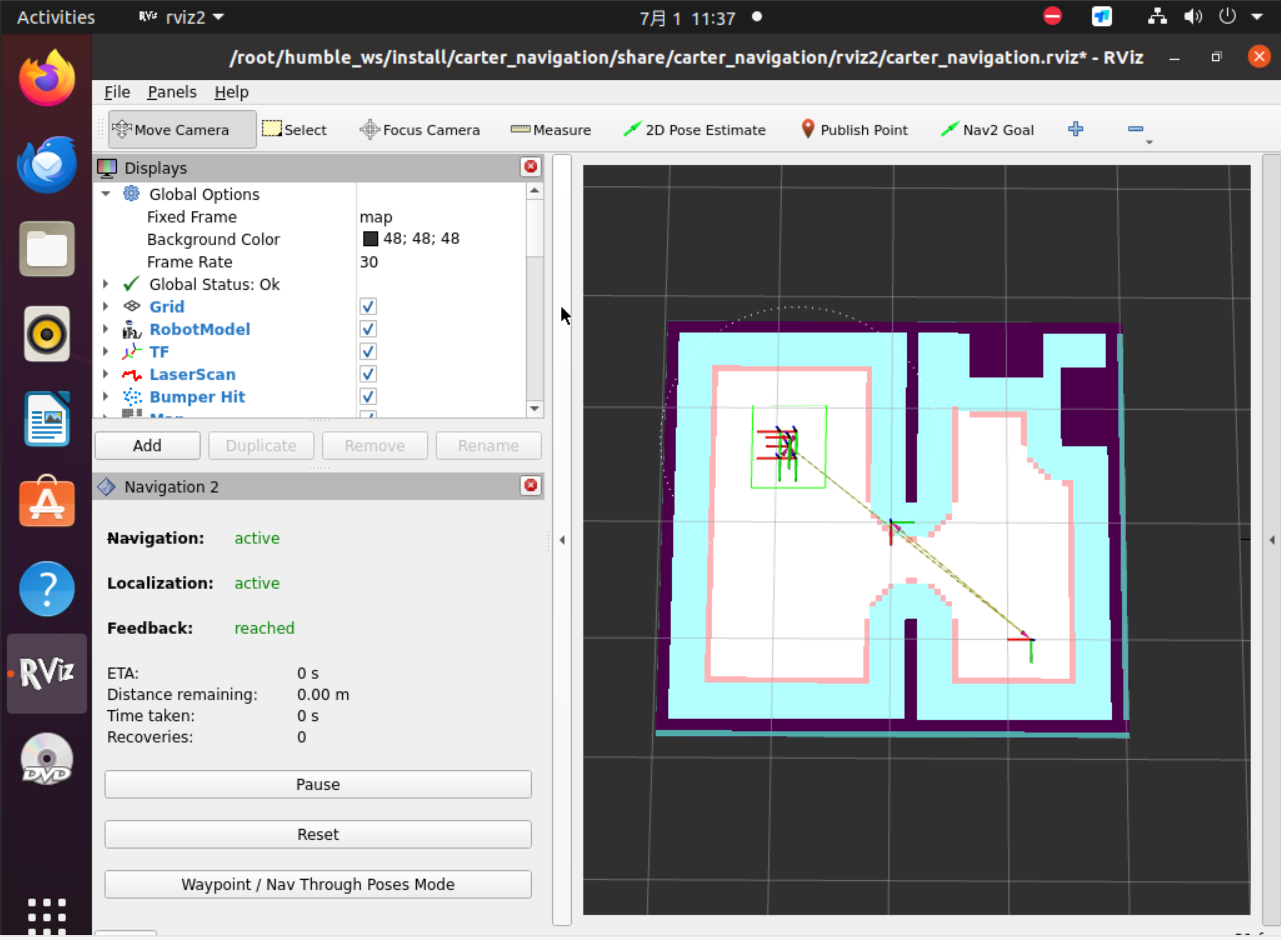
执行效果:

通过启动仿真的独立化脚本、ROS2的导航功能包,在rviz2界面中,设置目标点(Nav2_Goal)后,机器人在仿真中实现从A点到B点的导航。
5.1.2 视觉仿真案例¶
注意:本章节关于视觉识别的原理与Apriltag的相关知识可以参考4.2.2
5.1.2.1 实现思路与方法¶
通过将硬件设备投入仿真中,获取深度相机、RGB相机的数据,经过检测与处理,得到目标物体的坐标与位姿,最终将其发给机械臂进行抓取。
本项目的视觉系统采用与双臂路径规划相同的架构,即 ROS2 容器与 Isaac Sim 仿真容器相结合的架构。其中,ROS2 容器负责视觉算法的处理和计算,Isaac Sim 仿真容器负责机器人的控制和仿真。
数据流程设计:
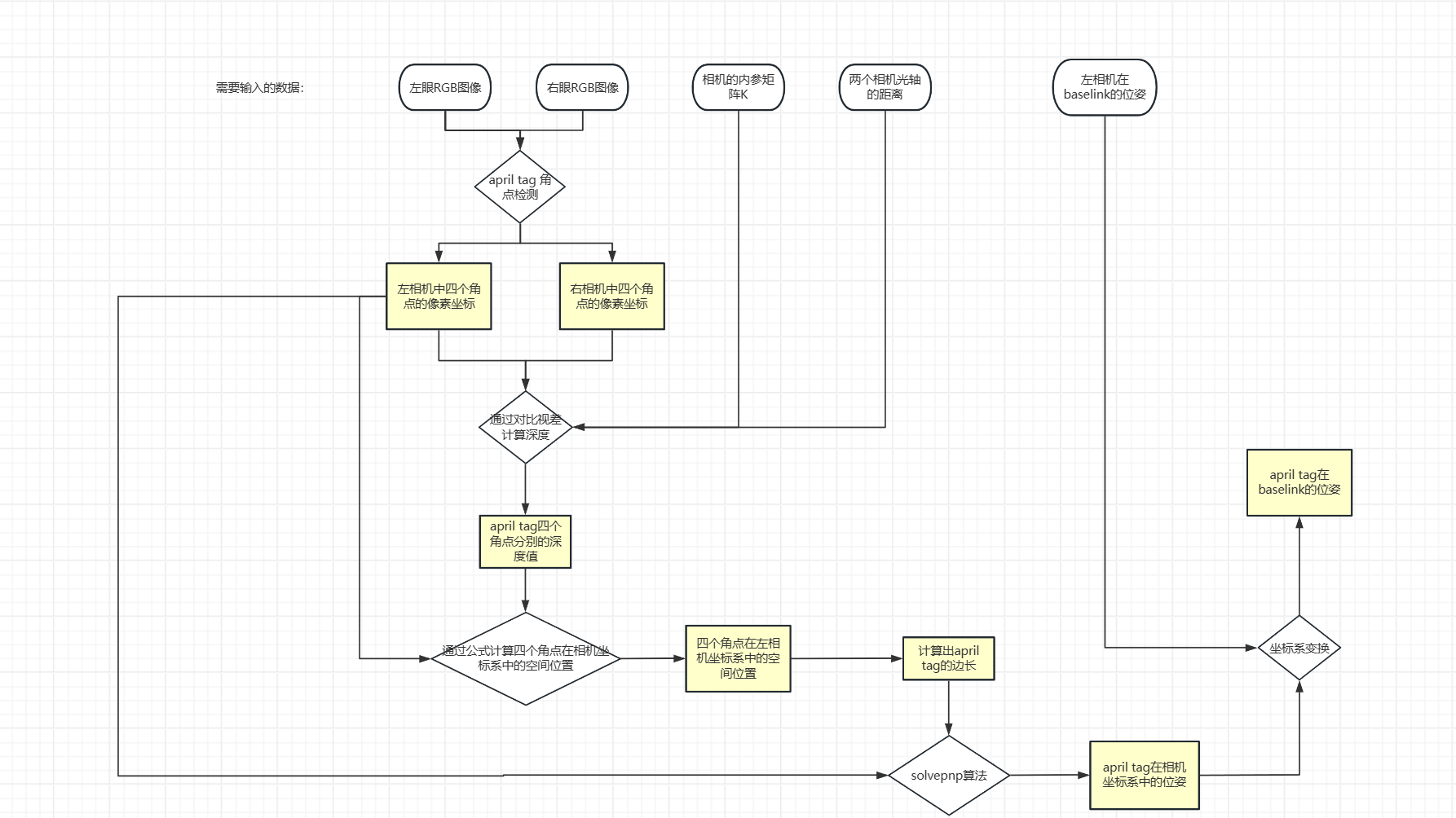
- 图像获取:Isaac Sim 仿真容器中的机器人头部双目相机拍摄包含二维码的图像。
- 图像传输:将拍摄的图像通过 ROS 话题传输到 ROS2 容器中。
- 图像处理与识别:ROS2 容器中的视觉算法对图像进行处理,识别二维码并计算其中心像素坐标。
- 深度获取:通过双目相机计算出的深度信息,计算二维码在相机坐标系中的位置。
- 坐标转换:将二维码在相机坐标系中的位置转换到世界坐标系中。
- 位置传输:将二维码在世界坐标系中的位置通过 ROS 话题传输给机械臂模块。
- 路径规划:Isaac Sim 仿真容器中的机械臂模块会根据二维码的位置进行路径规划,实现对二维码的抓取。
5.1.2.2 相机模块运行Demo¶
相机模块双目相机Demo,旨在让用户将流程跑通,理解相机模块的关键核心点。
我把demo的运行步骤给大家阐述一遍,即便是新手也能轻松入门!
在主机终端上输入,进入仿真容器:
docker exec -it isaacsim bash进入项目目录:
cd /isaac-sim/x1-manipulator
目录结构:
x1-manipulator/
├── USD_Save/
├── april_detect/ # 相机与AprilTag检测功能模块
│ ├── Binocular-vision/ # 双目相机检测子模块
│ └── depth-cam/ # 深度相机检测子模块
└── mercury_dual/
该demo任务是X1的双目相机通过相机识别算法,在仿真中动态获取目标二维码april_tag表面中心坐标。
进入相机目录:cd /x1-manipulator/april_detect/Binocular-vision
执行demo.py:python demo_Bino_course.py
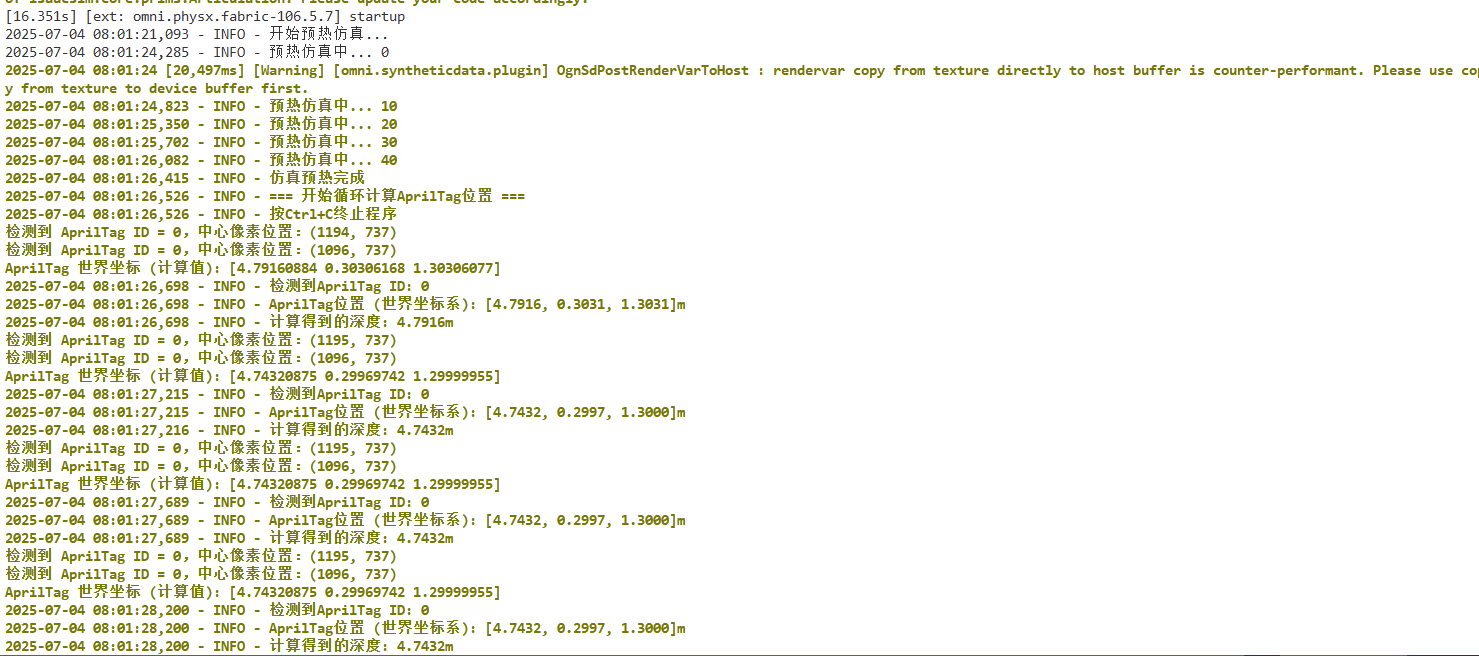
运行效果如下:
日志:
效果图:(这里的双目相机案例用的是虚拟相机,所以在仿真页面上看不见)
拖动二维码方块的效果图:
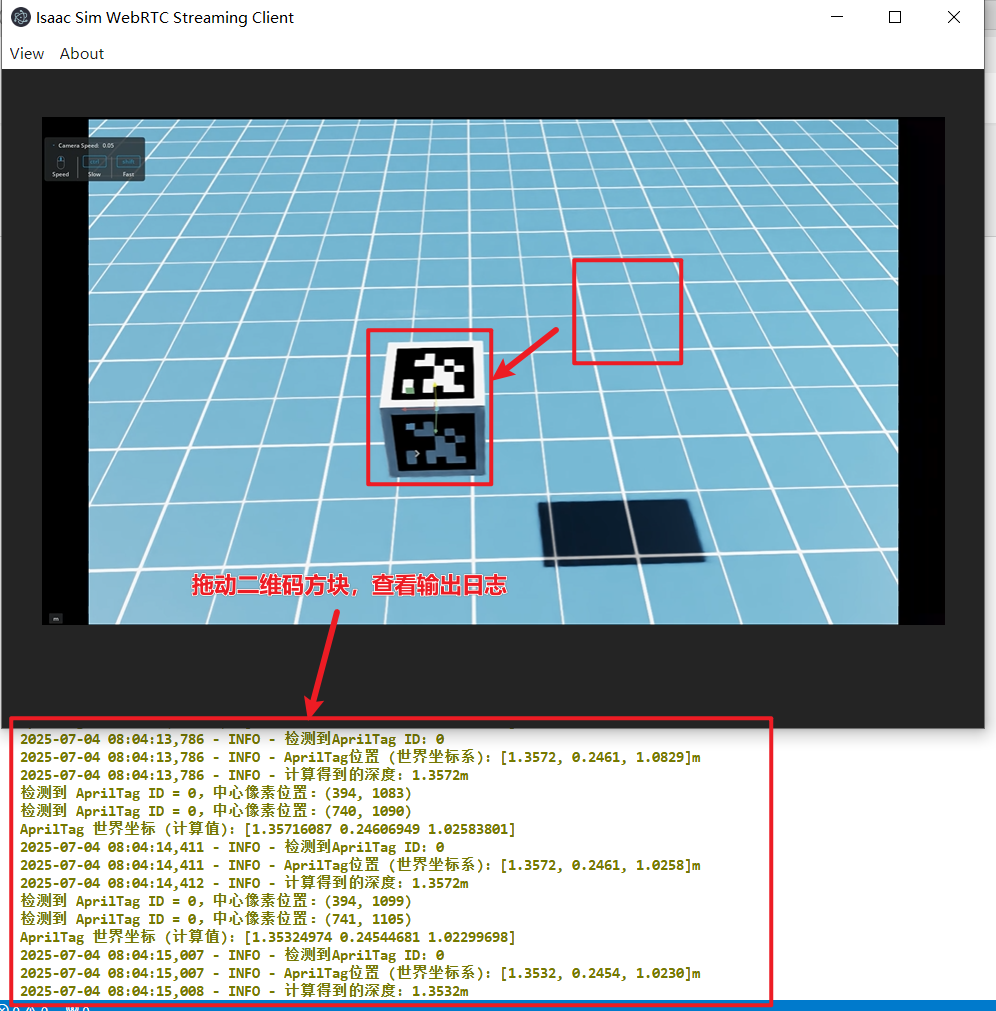
整体效果动图如下:(沿着xyz三轴坐标移动,三轴坐标值随之增大)

注意:这里只展示了双目相机demo,代码中还有深度相机,感兴趣的可以用同样的方式与步骤启动尝试一下。
5.1.3 双臂仿真案例¶
5.1.3.1 案例目标与实现思路¶
5.1.3.1.1 双臂协同抓取¶
本项目旨在实现双臂机器人的双臂协同抓取任务。即让双臂机器人的两个手臂能够相互配合,在复杂的场景中准确抓取目标物体。通过精确的路径规划和协调控制,使双臂在抓取过程中避免碰撞,高效、稳定地完成抓取任务,为实际应用如物流搬运、工业装配等提供技术支持。
下图是来自于官方的单臂机器人抓取任务示意图。
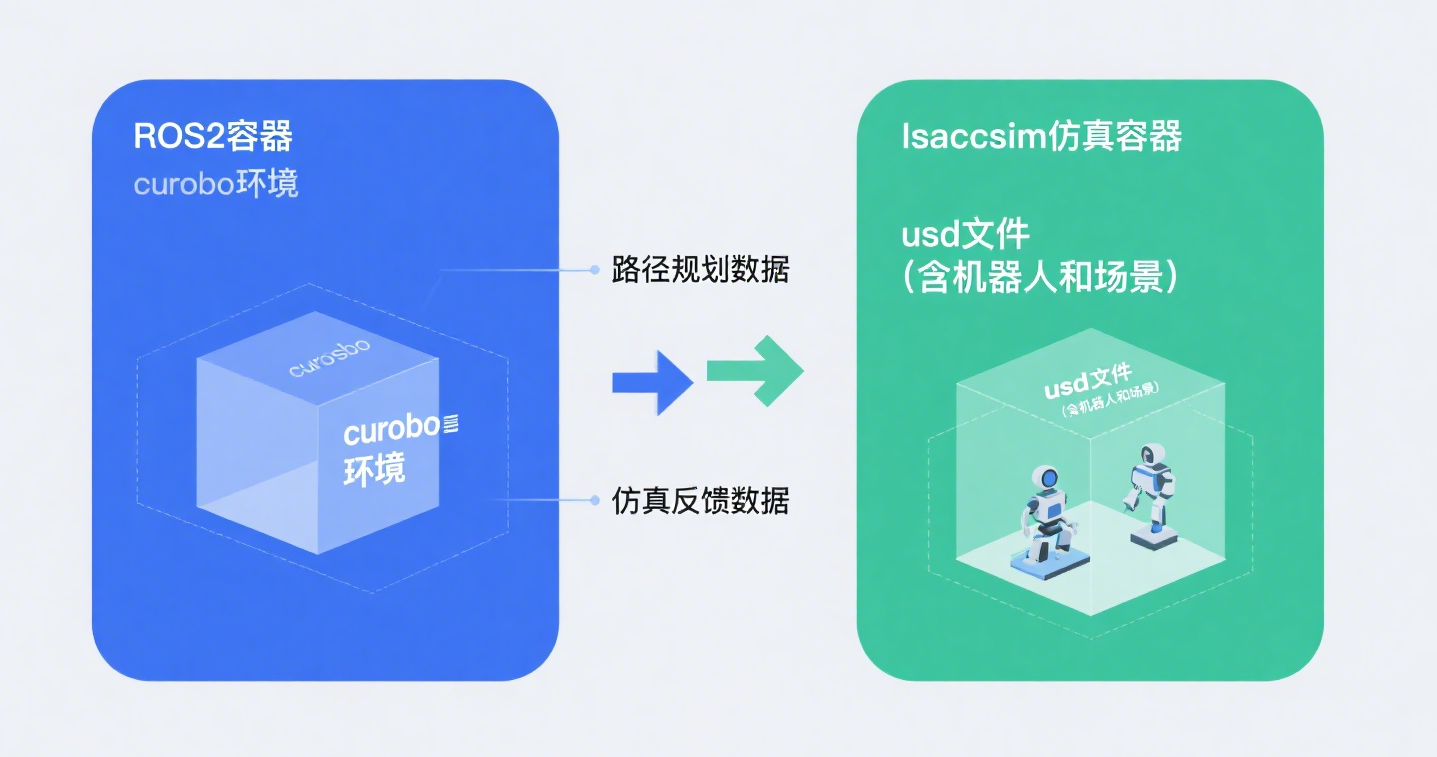
5.1.3.1.2 思路与架构图¶
首先,在 Isaccsim 仿真容器中搭建好包含机器人和场景的 usd 文件,构建逼真的仿真环境。接着,在 ros2 容器中完成 curobo 环境的装配与配置,确保 curobo 能够正常运行。然后,基于目标物体的位置和姿态,利用 curobo 计算双臂机器人每个关节的运动角度,规划出双臂的运动路径。在路径规划过程中,要考虑双臂之间的协同关系,避免运动干涉。最后,将规划好的路径发送给机器人,在仿真环境中进行测试和验证,根据测试结果对路径规划算法进行优化和调整,直至实现稳定、高效的双臂协同抓取任务。
5.1.3.2 cuRobo介绍¶
cuRobo,全称为CUDA加速机器人库,是一个由NVIDIA开发的开源项目,专注于为机器人提供高效、准确的逆解计算。cuRobo集成了多种先进的机器人算法,包括正逆运动学、碰撞检测、数值优化、几何规划、轨迹优化以及运动生成等。在双臂机器人路径规划中,它能快速根据机器人末端执行器的目标位置和姿态,计算出每个关节的角度,从而实现机器人手臂的灵活运动。通过使用curobo,开发者可以避免复杂的运动学计算,将更多精力投入到机器人任务逻辑的开发中,极大提高了开发效率。

cuRobo的核心优势在于其对CUDA技术的深度应用,这使得原本需要大量计算资源的机器人算法能够在GPU上并行处理,从而大幅缩短计算时间。具体来说,cuRobo实现了以下几个关键技术:
- 正逆运动学:通过CUDA加速,cuRobo能够在极短的时间内完成复杂的运动学计算,这对于实时机器人控制至关重要。
- 碰撞检测:cuRobo支持多种世界表示形式(如立方体、网格和深度图像),并能在GPU上快速进行碰撞检测,确保机器人操作的安全性。
- 数值优化:cuRobo集成了多种优化算法,包括梯度下降、L-BFGS和MPPI,这些算法在CUDA的加速下能够更快地找到最优解。
- 几何规划与轨迹优化:cuRobo通过并行处理多个种子,能够在30毫秒内生成全局运动轨迹,同时优化轨迹的平滑度和长度。
5.1.3.4 cuRobo 逆运动学核心算法解析¶
cuRobo 的逆运动学求解采用数值优化 + 解析解的混合策略,核心流程如下:
- 解析解初始化:利用 X1 机械臂的 DH 参数构建封闭解表达式,快速生成初始关节角度
- GPU 并行优化:通过 CUDA 加速 L-BFGS 算法,迭代优化关节角度使末端误差最小化
- 约束处理:
- 关节角度限制(如 1.2.1.3 节所述范围)
- 避障约束(基于 Octomap 障碍物地图)
- 双臂协同约束(避免左右臂碰撞)
5.1.3.4.1 与正运动学(FK)的对比¶
为了更好理解 IK,我们先对比其 “对立面”—— 正运动学(Forward Kinematics, FK):
- 正运动学(FK):已知每个关节的运动参数(如旋转角度、位移距离),计算末端执行器的最终位置和姿态。
- 例如:已知机器人 “肩膀转 30°、肘部转 60°”,计算 “手部最终在哪里”。
- 特点:计算简单直接(通过关节链的几何关系推导),但当需要精确控制末端位置时,需要手动调整每个关节参数,效率极低。
- 逆运动学(IK):已知末端执行器的目标位置和姿态,反推各个关节应有的运动参数。
- 例如:已知 “手部要抓到桌子上的杯子”,计算 “肩膀和肘部需要转多少度”。
- 特点:无需手动调整每个关节,直接通过目标位置反推关节运动,更符合人类直觉,适用于需要精确控制末端位置的场景。
5.1.3.4.2 IK求解器¶
IK 求解器是实现逆运动学计算的核心工具,其核心目标是在满足关节约束的前提下,让末端执行器精准匹配目标位置,并保证运动自然。根据解算逻辑可分为两类:
- 解析法求解器(Analytical Solvers)
- 原理:通过几何或代数公式推导关节参数的解析解(即数学上的精确解)。 例如,2D 两关节手臂(肩关节 O1、肘关节 O2,连杆长度 L1、L2,末端目标点 P (x,y)): 可通过余弦定理推导肘关节角度 θ2 = arccos [(x²+y²-L1²-L2²)/(2L1L2)],再通过反正切函数计算肩关节角度 θ1,直接得到精确解。
- 适用场景:结构简单的关节链(如 2D 两关节、3D 三关节机械臂),关节数量少(通常≤3 个)且运动关系可通过闭合几何公式表达。
- 优点:计算速度极快(无迭代过程,直接代入公式)、精度理论上无误差。
- 缺点:仅适用于特定结构,复杂关节链(如多关节机器人手臂)无法推导解析解,灵活性差。
- 数值法求解器(Numerical Solvers)
当关节链结构复杂(如 7 自由度机械臂、动画角色的四肢),无法通过公式直接求解时,需采用数值法迭代逼近解。常见类型包括:
- Jacobian 转置法
- 原理:通过 Jacobian 矩阵(描述关节速度与末端速度关系的矩阵),将末端位置误差 “映射” 为关节调整量,逐步迭代减小误差。
- 过程:先计算当前末端与目标的误差,再用 Jacobian 矩阵的转置将误差转换为关节旋转角度的调整值,重复迭代直到误差小于阈值。
- 优点:计算量小,适合实时场景。
- 缺点:可能因迭代发散导致关节运动异常(如角度突然增大),精度较低。
- 阻尼最小二乘法(DLS)
- 原理:在 Jacobian 转置法基础上加入 “阻尼项”(小常数),避免矩阵病态(如 Jacobian 接近奇异时的数值不稳定)。
- 优势:解决了 Jacobian 转置法的发散问题,能在冗余自由度系统中找到稳定解(如 7 自由度手臂的肘部自然摆放)。
- 适用场景:工业机器人路径规划、高精度末端控制。
- 循环坐标下降法(CCD)
- 原理:从末端关节向根关节 “逐节调整”,每次只优化一个关节,使末端更接近目标。
- 例如,调整 3D 手臂时,先动腕关节,再动肘关节,最后动肩关节,循环迭代直到末端达标。
- 优点:实现简单、对关节约束(如旋转范围)支持友好,运动更自然。
- 适用场景:计算机动画(角色肢体运动)、游戏角色控制。
5.1.3.4.3 cuRobo核心工作原理¶
cuRobo 是一款专注于机器人运动规划的高性能库,尤其擅长处理双臂机器人等复杂系统的 IK 解算与路径规划。其核心工作原理可从 “架构设计 - 数据载体 - 解算流程” 三方面展开:
- 架构选择:ROS2 与 Isaac Sim 的协同优势:
架构选择:采用 ROS2 容器与 Isaccsim 仿真容器相结合的架构。
- ROS2 作为机器人的 “大脑中枢”,负责处理传感器数据、执行路径规划算法(如 cuRobo 的 IK 解算)、发布关节控制指令。ROS2 的分布式通信能力(如话题、服务机制),可高效连接机器人的感知、规划、控制模块。
- Isaccsim 仿真容器则为机器人和场景提供了逼真的仿真环境,便于在虚拟环境中测试和验证机器人的行为。
文件执行:在 Isaccsim 仿真容器中打开并执行 usd 文件,usd 文件包含了机器人模型和场景信息,为机器人的运动提供虚拟载体。
环境装配:在 ros2 容器中装配 curobo 环境,借助 curobo 强大的逆解能力,实现双臂机器人的路径规划,让机器人手臂能够按照规划好的路径运动。
- 数据载体:USD 文件的核心作用:
USD(Universal Scene Description,通用场景描述)文件是连接虚拟环境与机器人模型的 “数字蓝图”,包含三类关键信息:
- 机器人模型数据:关节链结构(如肩关节 - 肘关节 - 腕关节的连接关系)、连杆尺寸、关节约束(如肘关节旋转范围 - 90°~120°)、运动学参数(如连杆质量、惯性矩阵)。
- 场景信息:虚拟环境中的物体(如桌子、工具、待抓取零件)的位置、尺寸、物理属性(如材质硬度、是否可碰撞)。
- 动画与交互逻辑:预设的机器人动作序列(如抓取姿态)、场景触发条件(如零件被触碰时的反馈)。
5.1.3.3 资源导入与环境配置¶
5.1.3.3.1 cuRobo安装教程¶
- 首先确定已成功安装好curobo库,安装方式:
- 使用我们制作好的带有curobo库的镜像
- 进入官网按照教程下载。https://curobo.org/get_started/1_install_instructions.html#library-installation
我们用Python独立库的方式安装的,而非“Install for use in Isaac Sim”
进入\mercury_dual\IsaacSim-ros_workspaces\humble_ws目录下,使用colcon build编译整个工作空间
编译完成后,进行环境的配置。
说明:¶
当前文件里面的函数只是调用curobo库的相关api进行规划,规划的具体实现,还请查阅curobo的相关文档。
网址:https://curobo.org/get_started/7_api.html
5.1.3.3.2 运行环境配置¶
进入ROS2容器:
docker exec -it ros2 /bin/bash
运行前的环境配置:
cd /root/x1-manipulator/mercury_dual/IsaacSim-ros_workspaces/humble_ws
rm -r build log install
colcon build
source install/setup.bash
环境配置完成后,执行以下操作。
5.1.3.3 双臂模块的执行Demo¶
进入Isaacsim仿真容器:
docker exec -it isaacsim /bin/bash
运行仿真场景:
cd /isaac-sim
./runheadless.sh
Open打开USD文件:/isacc-sim/x1-manipulator/USD_Save/mercury_x1_turing_stack_AddDoubleCamera.usd后,点击Play按钮,启动仿真。
进入ROS2容器:
cd /root/x1-manipulator/mercury_dual/IsaacSim-ros_workspaces/humble_ws
source install/setup.bash
ros2 run isaac_tutorials curobot.py
运行curobot.py脚本,控制机械臂运动到目标位置。
运行效果图:
运行日志: